
Robust Control of an Uninterruptible Power System (UPS) Using a Discrete Fuzzy Logic Sliding Mode Controller Approach
Article Sidebar
Main Article Content
Abstract
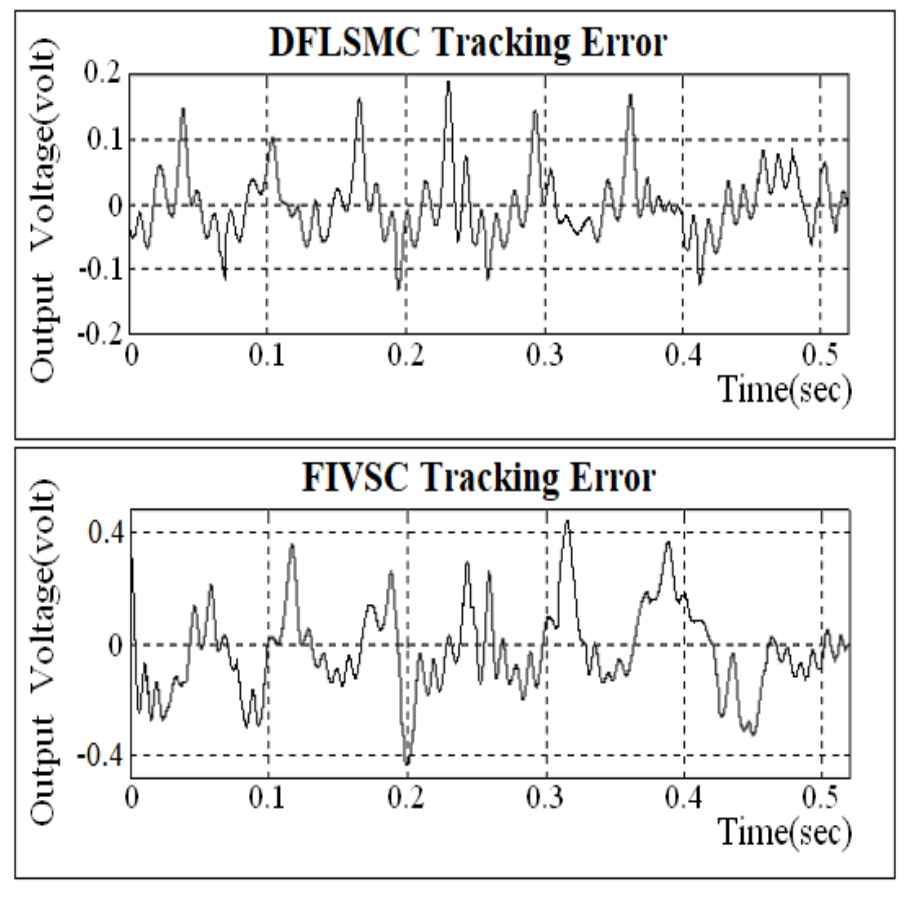
A Discrete Fuzzy Logic Sliding Mode Control or DFLSMC for the uninterruptible power system (UPS) is presented, which is tracking a sinusoidal ac voltage with specified frequency and amplitude. The control function is derived to guarantee the existence of a sliding mode. The rules of the proposed DFLSMC are independent of the number of system state variables because the input of the suggested controller is fuzzy quantity sliding surface value. Hence the rules of the proposed DFLSMC can be reduced. The application of DFLSMC to the UPS at sinusoidal frequency has show that the proposed approach can improved the tracking performance and the output waveform of the controlled PWM inverter is much more smooth that that of the previous study methods, like the VSC and PI strategies. Furthermore, its can achieve the requirements of robustness and can supply a high-quality voltage power source in the presence of plant parameter variations, external load disturbances and nonlinear dynamic interactions.
Article Details
References
[2] V.I. Utkin, J. Guldner and J. Shi. Sliding Mode Control in Electromechanical Systems. Oxford: Taylor & Francis; 1999.
[3] T.L. Chern and J. Chang. DSP-Based Induction Motor Drives using Integral Variable Structure Model Following Control approach. IEEE International Electric Machines and Drives Conference Record. 1997. pp.9.1-9.3.
[4] S. Nungam and P. Phakamach. Design of a Feedforward Integral Variable Structure Control Systems and Application to a Brushless DC Motor Control. IEEE International Symposium on Intelligent Signal Processing and Communication Systems, Thailand. Dec. 1999. pp.390-393.
[5] P. Phakamach and C. Akkaraphong. Microcontroller-Based Discrete Feedforward Integral Variable Structure Control for an Uninterruptible Power System. The International Conference on Power Electronics and Drive Systems, Singapore, Nov. 2003. pp.1422-1427.
[6] P. Phakamach. A Variable Structure Control Based on Fuzzy Logic Algorithm with an Integral Compensation for a DC Servomotor Drives. The International MultiConference of Engineers and Computer Scientists, HongKong, Jan. 2007. pp.1510-1516.
[7] S. Thongchai. Behavior-based learning fuzzy rules for mobile robots”, American Control Conference. Alaska, USA. May. 2002.
[8] L. Shiyong. Fuzzy Control. Ha Gong Da Publication Co., 1996.
[9] N. Worapongpat, P. Phakamach and U. Chaisakulkiat. UTK Journal. Rajamangala University of Technology Krungthep. 14(1). (January-June) 202
